Rigid Body Effector
Updated: 8 Jan 2026
Applies a rigid body simulation to a cloner system.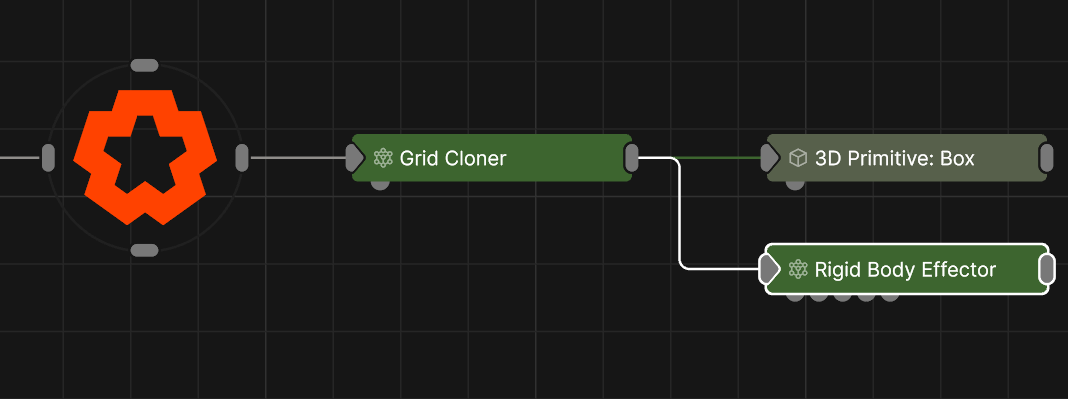
Updated: 8 Jan 2026
Applies a rigid body simulation to a cloner system.
The Rigid Body Effector node turns clones into rigid bodies. The resulting bodies are able to collide with each other, or with other bodies that are part of the same physics system - under the same Rigid Body Root.
If this node is parented via a Rigid Body Root it will be part of the physics system of that Rigid Body Root. Otherwise, this node is capable of acting as its own physics system, allowing for easy rigging of a simple physics system with a single cloner.
For best results ensure that the clones do not overlap in their initial position before dynamics is applied.
Unlike other cloner nodes, this Effector is a simulation node. This means that jumping in time will not produce predictable results, as the simulation needs to process the frames in between.
Connect the output to the effector input of any cloner node to apply it to the camera system. Multiple effectors connected to the same output will stack, and order of operations chosen by position on the nodegraph.
These properties control the 3D transforms of the node. Transforms will generally be inherited by child nodes, although they can be ignored through the Inherit Transform Channels attributes.
| Parameter | Details |
|---|---|
| Position X | The objects position along the local x-axis. |
| Position Y | The objects position along the local y-axis. |
| Position Z | The objects position along the local z-axis. |
| Rotation Heading | The objects rotation around the local y-axis. |
| Rotation Pitch | The objects rotation around the local x-axis. |
| Rotation Bank | The objects rotation around the local z-axis. |
| Scale X | The objects scale along the local x-axis. |
| Scale Y | The objects scale along the local y-axis. |
| Scale Z | The objects scale along the local z-axis. |
Control the inheritance of the transforms from the parent.
| Parameter | Details |
|---|---|
| Position | Toggle inheritance of the Position from the parent. |
| Rotation | Toggle inheritance of the Rotation from the parent. |
| Scale | Toggle inheritance of the Scale from the parent. |
| World Position Only | Inherit the world position from the parent only, rotation and scale will be ignored. Overrides above properties. |
| Inherit Time | Toggle inheritance of time from the parent. |
These properties control the physics settings the clones will be simulated under. Parenting a Physics Root node node will disable many of these properties as the node inherits those parameters instead.
| Parameter | Details |
|---|---|
| Mode |
How the Clones are used in a physics simulation.
|
| Shape Type |
The shape of the rigid body used for simulation of each clone. Often times, a simpler approximation of a mesh can be used for significantly improved performance.
|
| Convex Hull Mode |
If the Convex Hull shape is used, determines the convex hull mode used to wrap around the clones geometry.
|
| Max Velocity | The maximum velocity any rigid body in this system can reach. |
| Max Angular Velocity | The maximum angular velocity any rigid body in this system can reach. |
| Dampening | Reduces the velocity and angular velocity of bodies over time. |
| Smoothing | Smooths motion of bodies over frames to remove the visual appearance of jitters in the physics system. |
| Gravity | Gravity strength. Defaults to 9.8 but should be adjusted to reflect the scale of the scene. |
| Floor Collision Enabled | Generates a default floor plane to collide all rigid bodies with. |
| Floor Height | The height of the default floor plane. |
| Floor Static Friction | How much friction the floor has relative to static object. |
| Floor Friction | How much friction the floor has relative to moving objects. |
| Floor Bounciness | How much rigid bodies will bounce off of the floor. |
| Show Rigid Bodies | Displays a debug view of the actual rigid body shapes being used to calculate collisions. |
| Time Till Idle | The amount of time an object can be within the Idle Movement Threshold and remain active. |
| Idle Movement Threshold | The minimum amount a physics object can be moving before it stops receiving updates. |
These properties control the selection of clones that you want the effector to influence.
| Parameter | Details |
|---|---|
| Selection Mode |
Set the mode for Index-Based Weighting.
|
| Selection Operation |
Set how you want top define the selection.
|
| Index | The first clone index in the range. |
| Max Index | The last clone index in the range. |
| Index Step | The increment used in “Step” mode. |
| Index Seed | The seed used in “Random In Range” mode. |
| Index Falloff Range | Falloff amount for Index-Based Weighting. |
| Index Falloff Power | The curve power of the falloff for Index-Based Weighting. |
The properties control the physical properties of the clones, dictating how they will behave when they interact with each other or other physics objects in the scene.
| Parameter | Details |
|---|---|
| Static Friction | How much resistance there will be for rigid bodies that are at rest relative to each other to begin moving. |
| Friction | How much other rigid bodies will be able to slide along side this rigid body. When two rigid bodies of different frictions interact, the minimum value is used. |
| Bounciness | How much this rigid body will bounce off of other rigid bodies in the scene. |
| Density | The density of the rigid body. The density is scaled by the area of the shape to determine the mass of the body. |
| Collision Radius | The radius of collision shape if applicable. |
| Collision Mode |
Mode for calculating collision if applicable.
|
The properties control the time at which the node is active. See Timeline for editing time segments.
| Parameter | Details |
|---|---|
| Duration |
Control the duration of the node’s time segment.
|
| Node Time | The custom start and end time for the node. |
| Duration (Timecode) | The length of the node’s time segment (in time). |
| Duration (Frames) | The length of the node’s time segment (in frames). |
| Time Segment Enabled | Set whether the node’s time segment is enabled or not in the Timeline. |
| Name | Description | Typical Input |
|---|---|---|
| Rigid Bodies | Input Rigid Bodies from other systems to interact with the clones. | Rigid Body |
| Rigid Body Affectors | Input forces which can move and affect the Rigid Bodies. | Force Affector |
| Collision Shapes | Input geometry to use as collision shapes for the rigid bodies instead of the built in shapes or convex hulls. | 3D Object |
| Falloff Node | Use an input node to control the transformation values of the falloff. | Falloff |
| Procedural Falloff | Use a procedural system to generate falloff from. Useful for creating complex and unconventional falloffs from an Effector. | Procedural Root |
| Transform Modifiers | Apply the transforms of another node to this node. | Null |
| Target Node | Modifiy the rotations of the node to always direct the z axis towards the input. | Null |
| Local Transform Override | Apply the transforms of another node to this node, relative to its parent. | Null |